
1. Product introduction
The three-dimensional magnetic field mobile platform (WH-MFM-03) is a mobile platform independently developed by Wenhao Co., Ltd. for the microfluidic chip laboratory. With high precision, stability, and strong anti-interference ability, easy to use, simple to operate, complete touch screen setting and operation, input related parameters in the main interface, you can achieve accurate movement in the three dimensions of X-Y-Z Tasks can be suspended at any time during the work process. Various parameters can be reset and executed immediately.
In biochemical experiments, it is necessary to use the movement of an external magnetic field to realize the directional movement of magnetic particles such as magnetic beads. In response to this demand, Wenhao Co., Ltd. independently developed this three-dimensional magnetic field mobile platform, which is also suitable for magnetic beads in microfluidic control. Directional movement in the chip. It has the characteristics of simple operation, complete touch setting, operation, precise movement, etc., which can realize the arbitrary movement of magnetic particles in the three dimensions of X-Y-Z.
The three dimensions of XYZ can be separately set for motion parameters, including moving speed, distance, direction, and start/stop operation; the vertical direction (Z-axis direction) can be set to the lowest point to prevent the slight downward movement. Flow control chip; when the mobile platform moves in all directions, you can press the key to stop the motion task at any time.
The device is used to move magnetic particles with specific binding, such as magnetic beads, in a liquid medium. It can be used in biological sampling and analysis, such as molecular diagnosis and nucleic acid analysis, and the movement of magnetic particles or pillars in the biochemical reaction of biological molecules, including nucleic acids, proteins, antibodies, etc.
Magnetic particles: particles of any suitable form of a magnetic substance; Magnetic substances include any form of magnetism that generates magnetic poles in a magnetic field such as holding magnetism, diamagnetism, paramagnetism, superparamagnetism, ferromagnetism, etc., whether permanent or temporary.
2. Technical parameters:
Working mode: up, down, forward, backward, left, right;
Dimensions: 3D;
Maximum stroke: 80mm front and rear, 85mm left and right, 30mm up and down;
Magnet size: M5×6mm;
Travel resolution: 0.078 um;
Linear speed setting range: 0.01mm/s-5mm/s;
Setting range of each running distance: 0.01mm-99.99mm;
Control accuracy: ≤±0.5% (when the stroke ≥ 30% of the maximum stroke);
Setting method: full touch screen setting;
Display mode: 5-inch color LCD screen;
Weight: 8.5 kg;
Working voltage: AC 220V±10V/50HZ;
Dimension: 318×280×390 mm (length×width×height);
Working environment: temperature 0°C-40°C, relative humidity <80%.
3. Illustration:
(1) N35 neodymium iron boron magnet; (2) cantilever; (3) adjusting arm; (4) tightening knob; (5) push block; (6) display screen (7) foot; (8) switch socket.
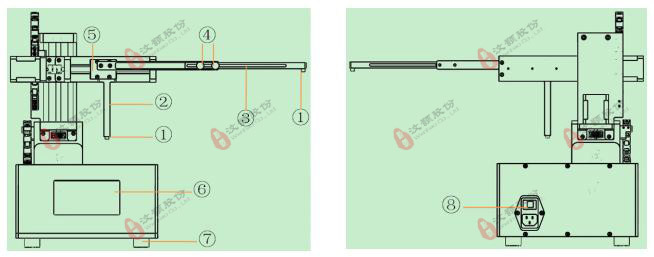
Mobile platform diagram
*Note: The cantilever ② and the adjustment arm ③ can be selected according to the actual situation. If you operate on this device, you can only use the cantilever ②. If it is used with a microscope, you can choose the adjustment arm ③. By tightening the knob, the extension length of the arm can be manually adjusted.
4. Description of the operation interface of magnetic mobile equipment
Turn on the power and enter the system’s primary interface (as shown in the figure below, the language can be translated in to English ).

Before the equipment is running, set the lowest point to protect the microfluidic chip from being crushed; after the lowest point is set, the system defaults the maximum ascent stroke of 30mm.
If you need to know more information, please consult our customer service for product manuals!
The equipment uses include: microfluidic chip magnetic control sorting.